快速上手
驱动安装
第一步应下载对应相机的驱动,便于图片传递。
以采用度申MGS系列千兆网工业相机为例,驱动下载地址。
下载完毕后,解压缩,进入文件夹并双击 Installer.exe 文件。
保持默认选项和默认路径,点击“执行”。
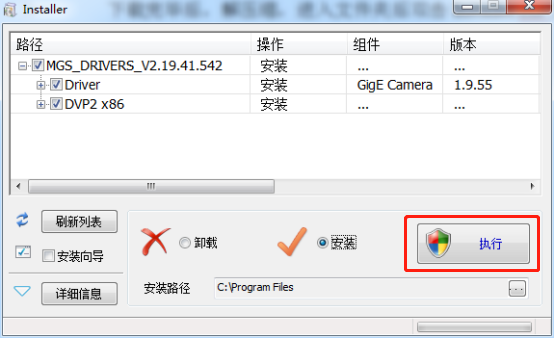
有些机器安装至最后会弹出一个窗口,如下图所示:
点击“退出”即可。退出之后,安装程序会提示所有操作执行完毕,此时可以关闭安装程序。至此,驱动安装完成。
提示
需按照相机具体型号,安装对应驱动。
界面总体介绍
GtHawkeye是一款基于PC端的视觉软件。本软件功能主要有:
- 可视化编程,添加模块即可完成配置;
- 监控结果;
- 与其他系统进行通讯;
- 跨平台;
- 现代化扁平式操作界面;
- 可二次开发。
下图为软件界面:
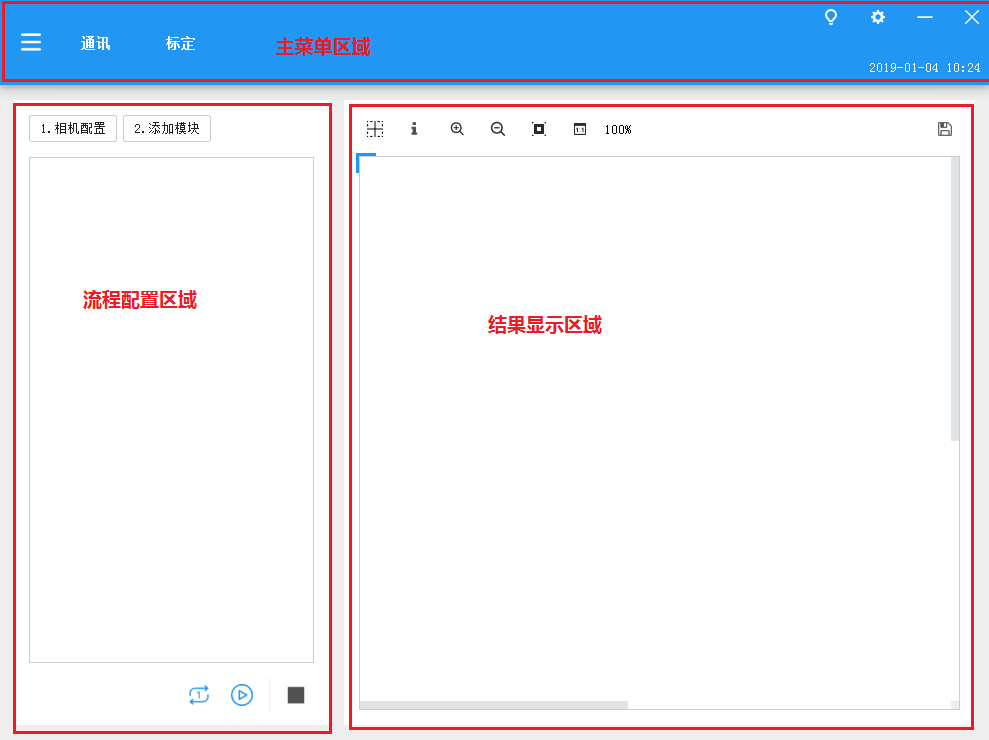
其中:
主菜单区域
- 保存工程,将已经配置好的流程保存为文件格式,默认位置Data/projects,也可以保存在其他目录下;
- 打开工程,打开保存好的工程;
- 查看软件操作;
- 更换视图,可以控制结果页面是否显示;
- 设置菜单,用于软件的全局设置;
- 通讯,用于配置如何输出视觉流程中产生的结果;
- 标定,用于生成图像坐标到世界坐标的转换关系。
流程配置区域
- 相机配置,可以连接相机并配置参数 ,同时也可以配置为仿真模式,便于用户调试图像;
- 添加模块,添加基本视觉模块,组成最终流程,默认执行顺序从上到下。
结果显示,用于显示最终结果和图像。
视觉软件操作流程
下面配置并运行一个定位的简单应用。该应用主要实现定位、上位机监控和TCP传递结果的功能。开始之前,请参照驱动安装,确保正常连接相机,并参照软件注册码,完成软件注册。
添加模块
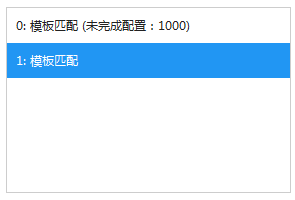
依据功能需求,需要一个定位算法模块,用于定位目标物体的位置。添加方式为,单击工程配置区域的“添加模块”按钮,出现工具页面,如图:

选中所需模块,本例中添加“模板匹配”模块,用于定位。单击“添加”即可加入到工作流中,新加入的位置在工作流的末尾,工作流的界面将会更新:
参数配置
添加“模板匹配”模块之后,参数配置页面会自动弹出:
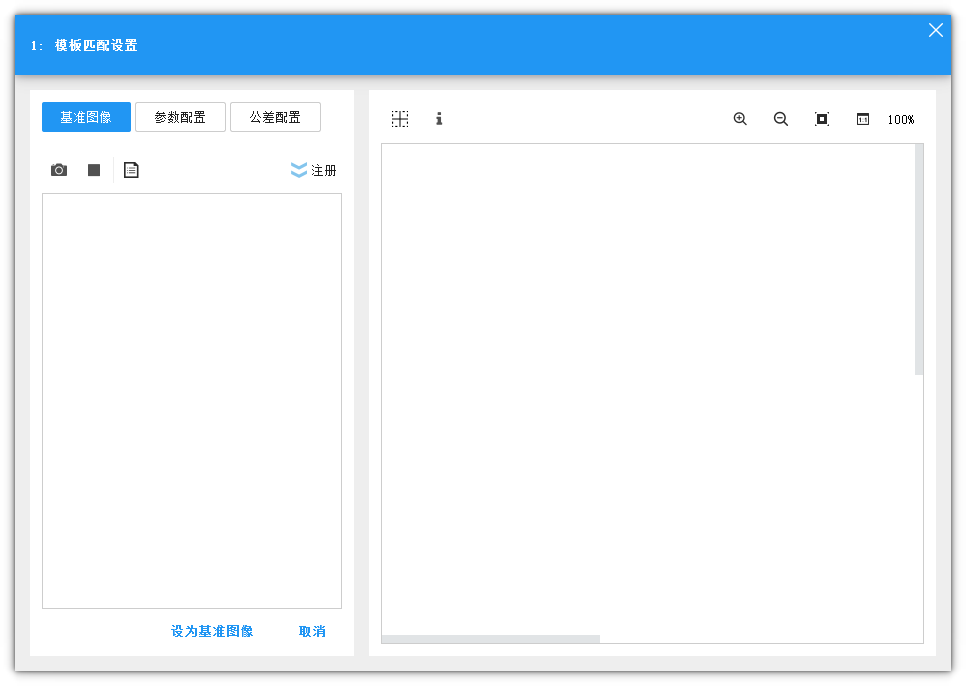
模板匹配需要采集一张目标的图像,并注册为基准图像,并以基准图像中的轮廓为基准,寻找实际运行时候轮廓的位置。
首先,确认已经连接相机,如果没有,请退出当前配置页面并连接相机。
点击最左边的相机按钮,采集图像,在右侧观察图像,直到出现想要的定位的物体轮廓。例如定位图中的固高LOGO。
技巧
保证轮廓边缘清晰、锐利。
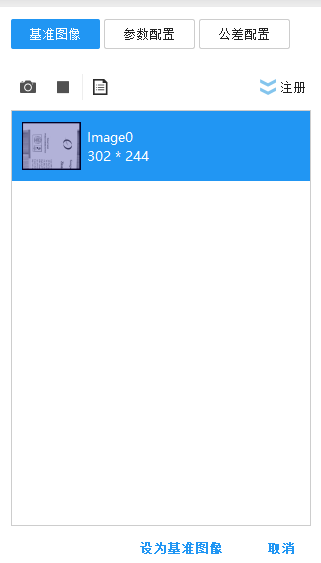
然后,点击注册按钮,注册为新的基准图像。并在下方列表中选中该图片,点击确认,设置为本模块所需的基准图像。
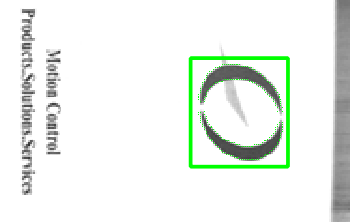
之后,进入具体的参数配置。主要是拖动右侧图像中的矩形框,来确定学习轮廓的范围。如图,框选固高LOGO,会自动绘制出学习出来的边缘点(图中绿色小点)。
单击关闭按钮退出配置界面,并保存参数,即完成模板匹配的配置。如需其他细节的参数配置,请参考详细的模板匹配模块介绍。
通讯配置
为了示范相机软件如何与机器人系统等外部系统通信,下面配置通信模块。
通信模块主要功能是配置输出的规则。例如需要通过TCP方式输出定位的x,y坐标和旋转角度,流程如下:
软件启动之后,默认开启TCP服务,作为服务器端,并开放502端口。
单击主菜单“通讯”按钮打开配置页面。

单击左侧列表,选中需要通信的模块,本例程只添加了一个模板匹配模块,程序默认选中第一个,所以不需要重新选择。
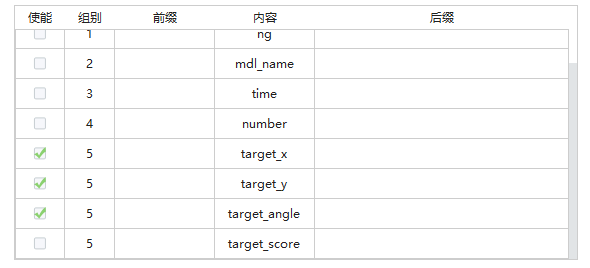
单击使能栏中的复选框,选中需要的结果:target_x、target_y、target_angle。结果的个数如果大于1,会按各个组别循环输出。
单击右下角确定按钮,即可退出并保存该配置。
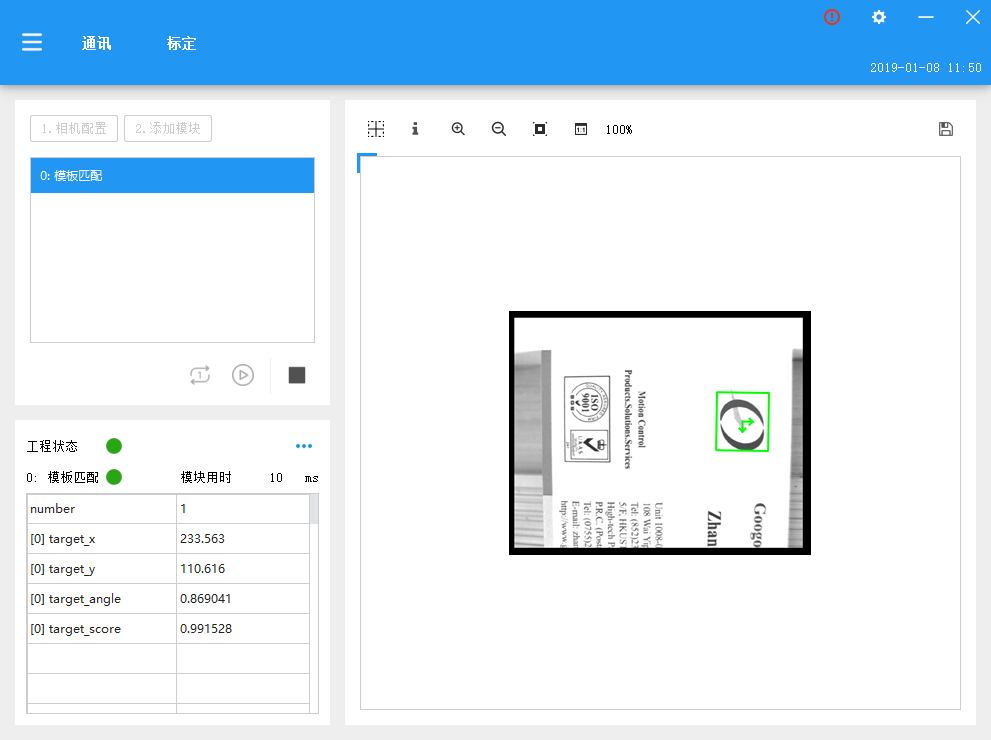
运行并查看结果
全部配置已经完成,现在可以运行了。
点击流程配置区域的“运行”图标,即可进入运行时界面。
左侧上方显示模块列表,单击对应模块可切换结果显示,左侧下方显示具体的结果数值,右侧显示图像绘制结果。
TCP通讯的结果在实际项目中,可直接使用机器人系统等监听相机端口。调试期间,可通过TCP调试助手查看。
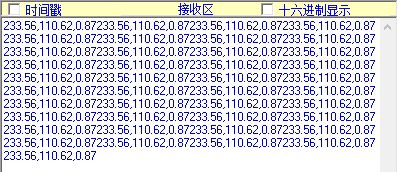
如图配置TCP助手,IP设置为当前相机的IP,端口固定为502,然后点击监听网络:

结果显示如图:(x,y和angle三个数据依次输出,组内以逗号隔开)